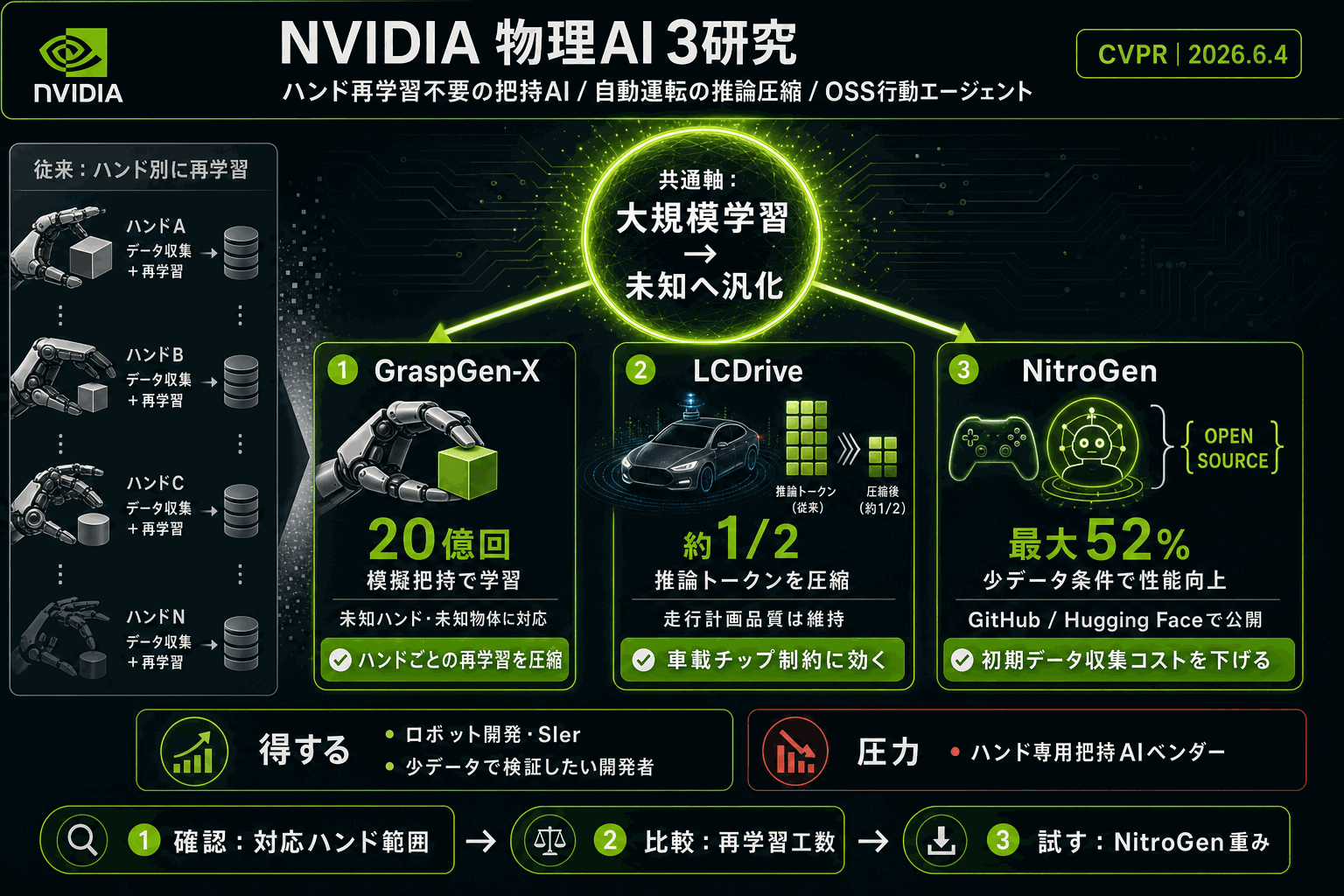
NVIDIA Researchが2026年6月4日、画像認識の国際学会CVPRで物理世界向けAIの3研究を発表した。
GraspGen-Xは20億回の模擬つかみ取りデータで学習し、未知のハンド・未知の物体に対応する初の把持基盤モデルである。従来はグリッパごとに学習データ収集と再調整が必要だったが、これを1モデルで吸収し、動作計画ライブラリcuRobo V2と併用できる。LCDriveは言葉での逐次推論を圧縮した内部表現に置き換え、約半分のトークンで同等の走行計画品質を達成した(基盤はAlpamayo)。車載チップ上の処理速度制約に直結する。NitroGenは1,000本超のゲームと4万時間の操作データで学習し、少データ条件で従来比最大52%の性能向上を示した。GitHubとHugging Faceでオープンソース公開されている。
3つに共通するのは「大規模学習で未知に汎化する」という設計思想で、人型ロボット基盤モデルIsaac GR00Tで進めてきた方針を把持・運転・仮想エージェントへ広げたものだ。