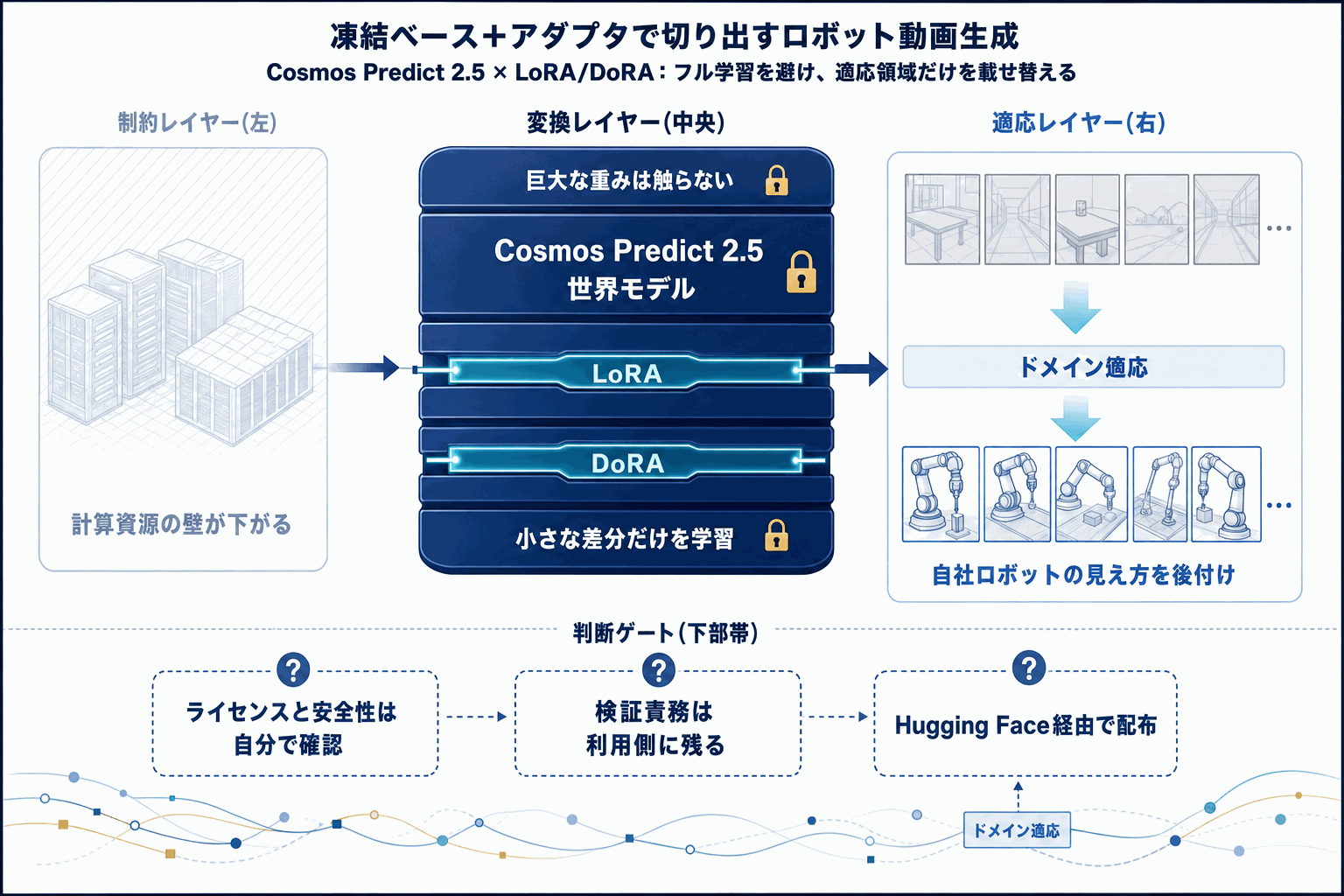
NVIDIAがHugging Face上で公開したガイドは、世界モデル系の動画生成基盤「Cosmos Predict 2.5」を、ロボット動作の動画生成タスクに適応させるための微調整手順をまとめたものだ。学習手法としてLoRA(Low-Rank Adaptation)とDoRA(Weight-Decomposed Low-Rank Adaptation)を採用しており、ベースモデルの全重みを更新するフルファインチューニングではなく、軽量なアダプタ層のみを学習させる構成になっている。
このアプローチの実務的な意味は二つある。第一に、計算資源の壁が下がる。世界モデルクラスの動画生成モデルをフル学習するには大規模GPUクラスタが必要だが、LoRA/DoRAであれば小〜中規模の環境でも自社ロボットの観測データを使った領域適応が現実的になる。第二に、配布経路がHugging Faceに置かれたことで、研究室やスタートアップが既存のtransformers/diffusersエコシステムの作法のままアクセスできる。
一方で読者が確認すべき論点も残る。Cosmosのライセンスが商用ロボット製品への組み込みをどこまで許容するか、生成された合成動画を実機学習データとして使う際の安全性検証フロー、LoRAとDoRAのどちらが対象ドメインで収束しやすいかは、自社データで実測する必要がある。記事化された公式手順はあくまで出発点であり、ロボット種別ごとの最適なランク数や学習ステップは個別の検証で詰める領域に残されている。