本論文は、学習機能を備えた自律プラットフォームのサイバーセキュリティ評価を、実機や機密インフラに依存せず再現可能な形で行うための方法論を提示している。提案は「脅威指向デジタルツイニング」と呼ばれ、代表的な自律スタックをオープンソースのモジュール型ツインとして実装する。
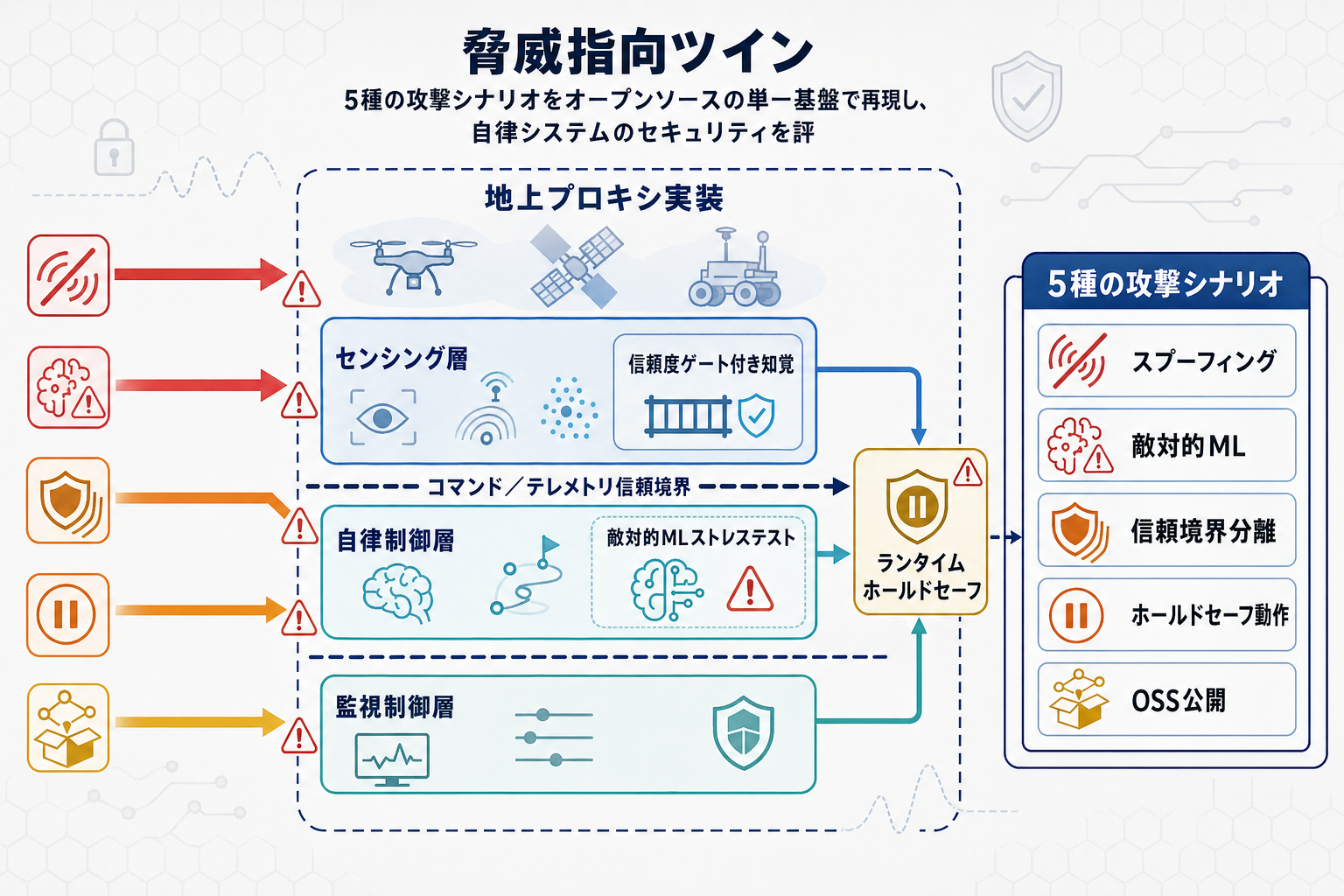
設計の中核は3点ある。第一に、センシング・自律制御・監視制御の機能を明示的に分離した構造。第二に、信頼度ゲート付きのマルチモーダル知覚と、コマンド・テレメトリに対する信頼境界の明示。第三に、異常検知時のランタイムホールドセーフ動作である。これにより、脅威分析の結果を観測可能かつ制御可能なテストケースに翻訳できる。
対応する攻撃シナリオは、スプーフィング、リプレイ、不正入力注入、センサー劣化、敵対的MLストレスの5種類。実装は地上ベースのプロキシだが、制約されたオンボード計算資源、断続的または高遅延な通信リンク、確率的知覚、ミッションクリティカルな復旧動作といったUAV・宇宙システムと共通のスタック要素を意図的に採り入れている。
意義は、オープンかつ非機密の条件下で、依存性とセキュリティを扱う自律性研究の共通土台を提供する点にある。実機テストベッドへのアクセスに乏しい研究コミュニティでも、同一設計パターンを用いて比較可能な実験を行える。日本の研究機関・スタートアップにとっても、UAVや宇宙機のセキュリティ評価を議論する際の参照実装として活用しやすい。本成果はIEEE/IFIP DSN-W 2026のDSASワークショップにカメラレディ採択済みである。