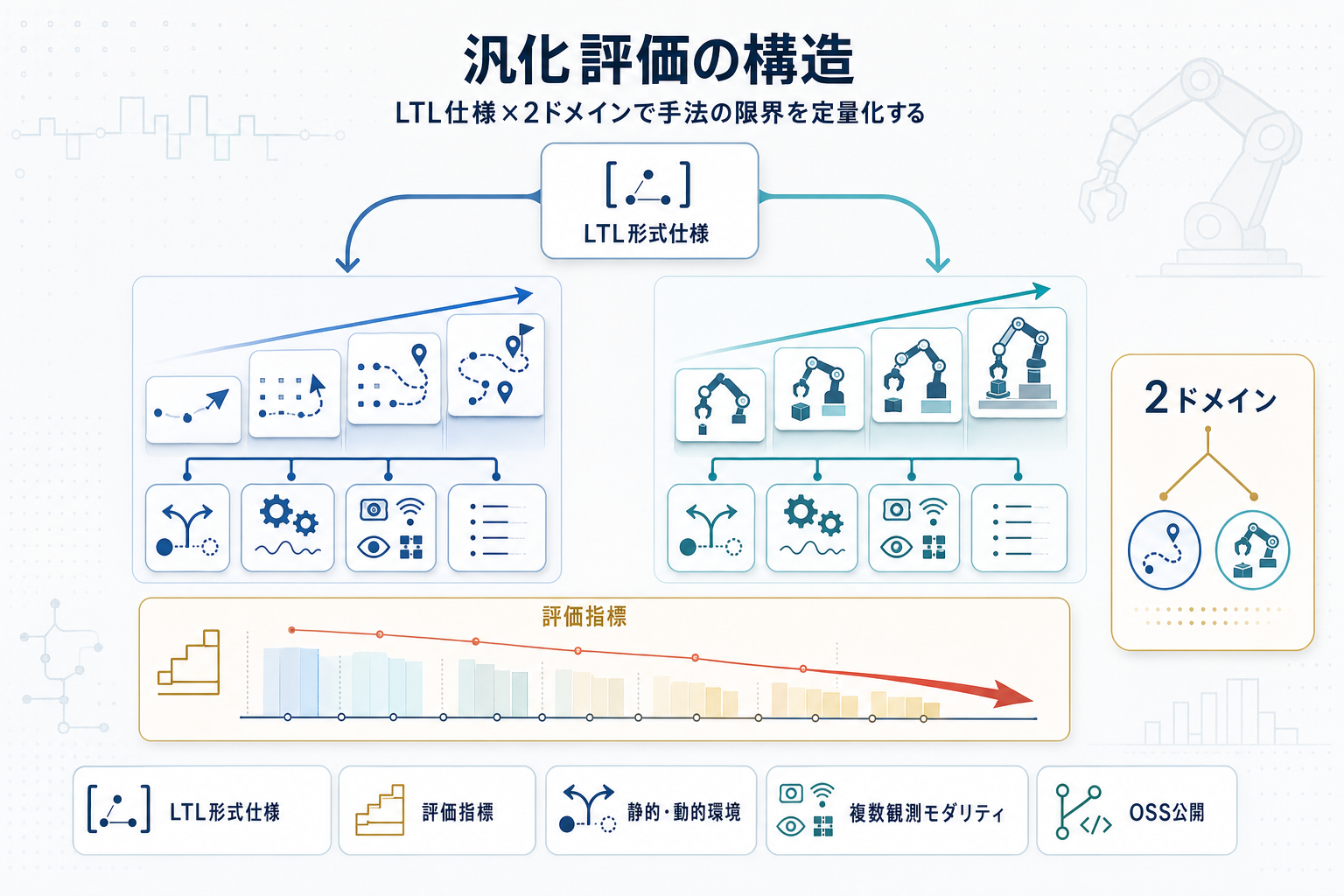
SpecRLBenchは、線形時相論理(LTL)のような形式仕様でタスクを記述する「仕様ガイド強化学習」の汎化能力を測るために設計されたベンチマークである。仕様ガイドRLは、単一の報酬関数では書き下しにくい時間的に拡張されたタスク(順序・繰り返し・回避などを含むタスク)を原理的に扱える枠組みとして、近年成果を上げてきた。しかし、学習済み方策が未見のLTL仕様や異なる環境に汎化するかどうかは、これまで評価方法が研究ごとに異なり、比較が難しかった。
SpecRLBenchはこの課題に対し、ナビゲーションとマニピュレーションという2つの代表的ロボティクスドメインに、複数の難易度レベルを階層的に設定する。静的環境と動的環境の両方をカバーし、ロボットダイナミクスや観測モダリティも複数揃えることで、手法が「どの軸の複雑化に弱いか」を切り分けられるよう設計されている。論文では既存手法を広範に実証評価し、仕様や環境の複雑度が上がるほど性能が劣化する具体的なパターンを示している。
実装コードはGitHubで公開されており、研究コミュニティはすぐに追試と自手法の比較が可能だ。日本のロボティクス・自律システム研究や産業応用の文脈でも、安全性と検証可能性が問われる制御領域で仕様ベース手法への関心は高く、共通評価軸の整備は手法選定や投資判断の精度を高める。一方、これはあくまで研究向けベンチマークであり、実機への移行や日本固有の運用要件(認証・安全基準)への適合は別途評価が必要である点は注意したい。