本論文は、AIエージェントが目標達成のために環境と持続的に相互作用する際、環境ダイナミクスをモデル化する能力が中心的ボトルネックになるとの問題意識から出発する。課題は「ワールドモデル」という語が研究コミュニティごとに異なる意味で使われてきた点にあり、論文は「レベル×法則」という二軸分類を導入してこれを整理した。
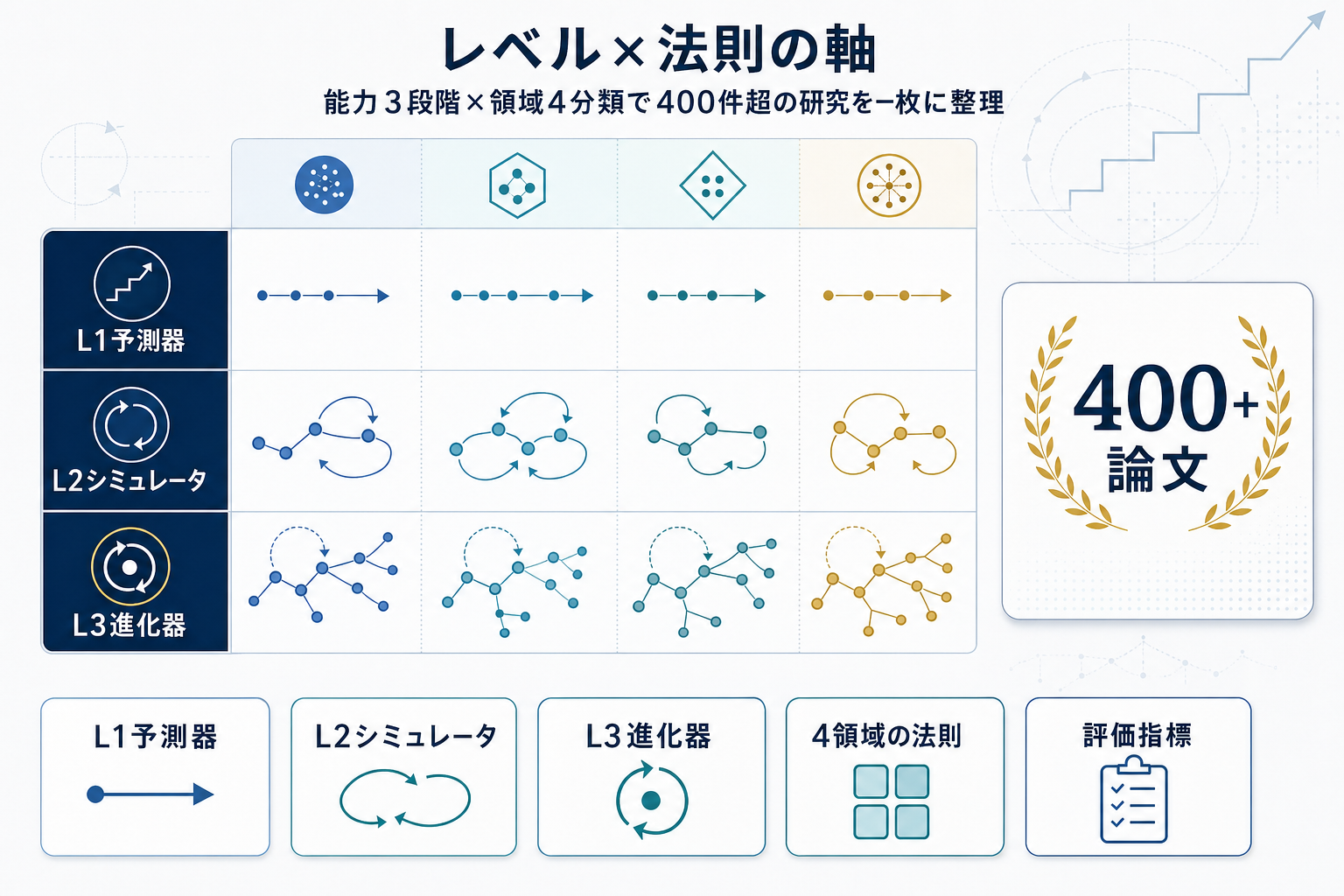
能力レベルはL1 Predictor(1ステップの局所遷移演算子を学習)、L2 Simulator(それらを組み合わせて領域法則を守る多ステップの行動条件付きロールアウトを行う)、L3 Evolver(新しい証拠に対して予測が失敗したときに自律的に自身のモデルを改訂する)の3段階。支配法則は物理・デジタル・社会・科学の4領域で、各領域がワールドモデルに課す制約と失敗しやすい箇所を規定する。
この枠組みを用いて、モデルベース強化学習、動画生成、ウェブ/GUIエージェント、マルチエージェント社会シミュレーション、AI駆動の科学発見にまたがる400件超の論文と100以上の代表システムをレビューし、手法・失敗モード・評価手法をレベルと領域のペアごとに分析している。さらに意思決定中心の評価原則と最小再現可能評価パッケージを提案し、アーキテクチャ指針、未解決問題、ガバナンス課題も提示する。受動的な次ステップ予測から、環境をシミュレートし最終的には作り変えるワールドモデルへと至る道筋を描く包括的ロードマップであり、分断していた研究コミュニティを接続する共通言語として機能する点が最大の価値である。